
Magnetorheological elastomers
We are creating our magnetorheological elastomers (MRE) by mixing addition silicone with ferromagnetic particles (Fe85Si15, average size 27.2 um). Using addition silicone as the base material for the dispersion of the ferromagnetic particles allows wide possibilities of adaptation of material properties, material shape adaptation by molding or the possibility of attaching the soft material to solid structures. Additives can be used to adapt the material properties for the specific application. We are using this material in a number of prototypes that continues to grow. Two of the larger projects are Beak and Intestino prototypes.
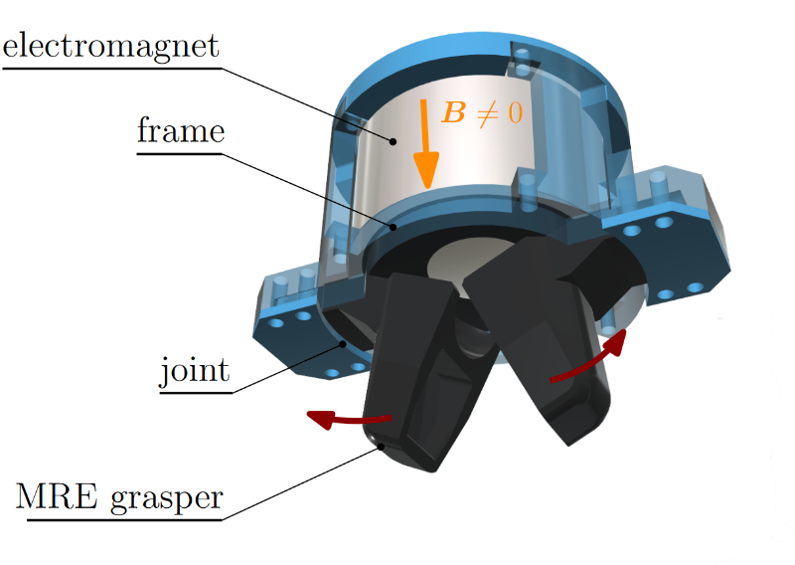
The Beak prototype consists of independent moveable graspers made from MRE. To control the Beak prototype operation, a magnetic circuit with electromagnets is attached to the top of the platform. Opening, closing and also pressure exerted by the graspers are possible to control continuously by excitation of the electromagnet. Once the external magnetic field is applied, it attracts the graspers which can surround and catch the object softly and firmly between them.
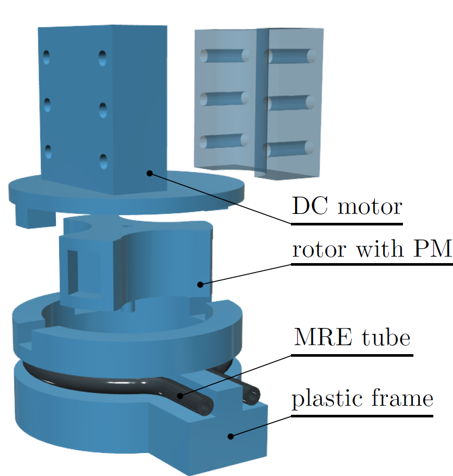
The Intestino prototype is a kind of a peristaltic pump. The pump consists of a plastic rotor, fitted with permanent magnets, powered by a DC motor creating a rotating magnetic field. The crucial part of the pump is a flexible tube made from magnetorheological elastomer placed around the rotor. When exposed to an external magnetic field generated by the permanent magnets, the tube collapses and presses its inner liquid content, thus creating a peristaltic effect.
Future challenges
- Making the Beak prototype even more versatile, tactile and self-sensing deformations using new kind of material.
- Miniaturizing the Intestino prototype to a microscale level. Ability to integrate this micropump into a microfluidic channel.
Publications
V. Skřivan, O. Sodomka and F. Mach, "Magnetically Guided Soft Robotic Grippers," 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea (South), 2019, pp. 126-130, doi: 10.1109/ROBOSOFT.2019.8722762.
O. Sodomka, V. Skřivan and F. Mach, "Magnetic Forces Behind Hyperelastic Behavior of Magnetorheological Elastomers," in IEEE Transactions on Magnetics, vol. 56, no. 7, pp. 1-4, July 2020, Art no. 7516804, doi: 10.1109/TMAG.2019.2952760.