
Magnetic Scanner
In our research, the need for verification, if the real magnetic field over the actuation coils of our minirobotics system is behaving as we thought, was formed. To get this verification, a versatile and precise magnetic scanner was created. This scanner can scan an area of 50 x 50 mm with resolution up to 100 MPx while each pixel is representing a 3D vector of magnetic flux density. The magnetic scanner consists of three parts. The first part is a measuring device, the second part is a micropositioning device and the third part is PC software.
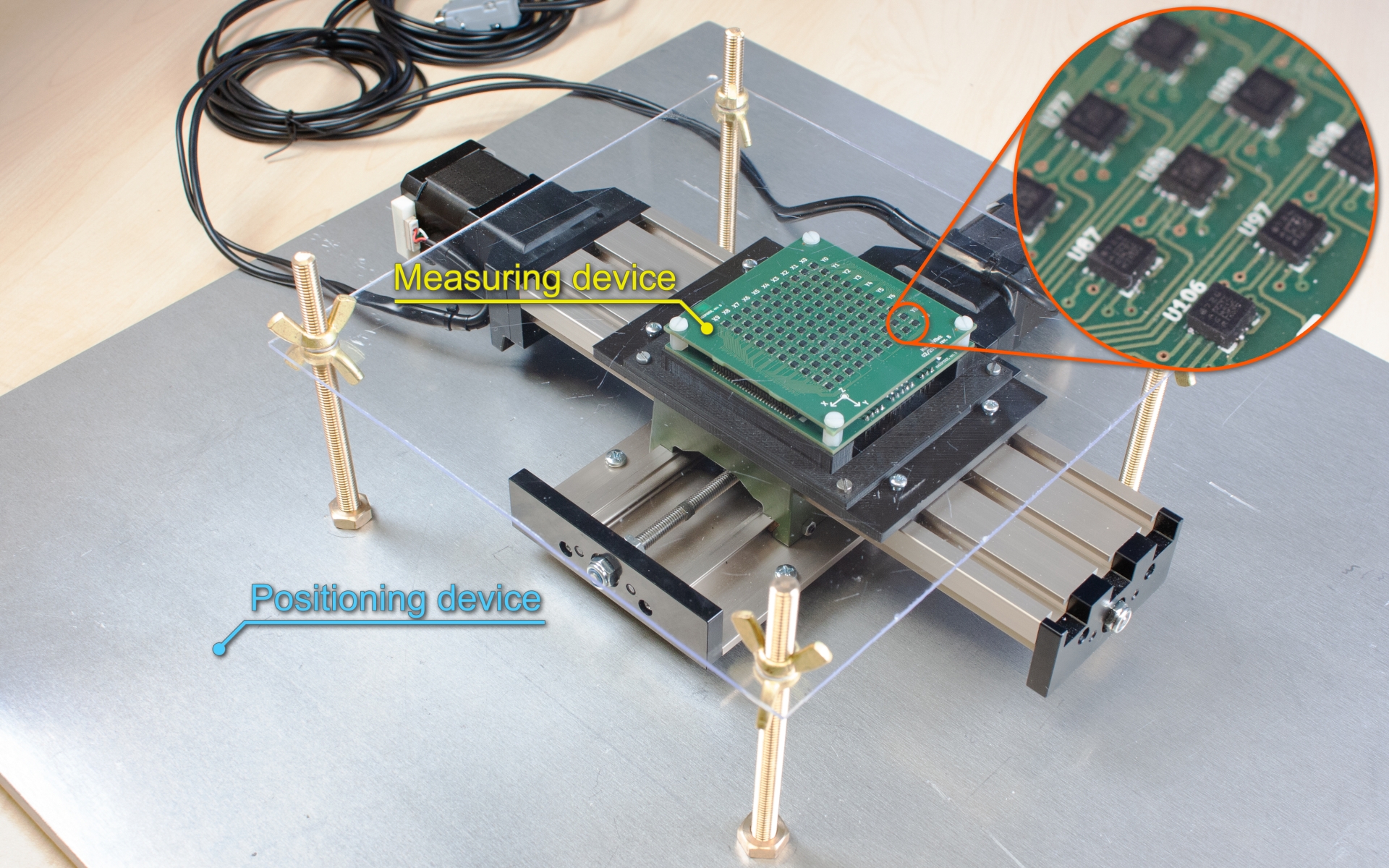
Measuring Device
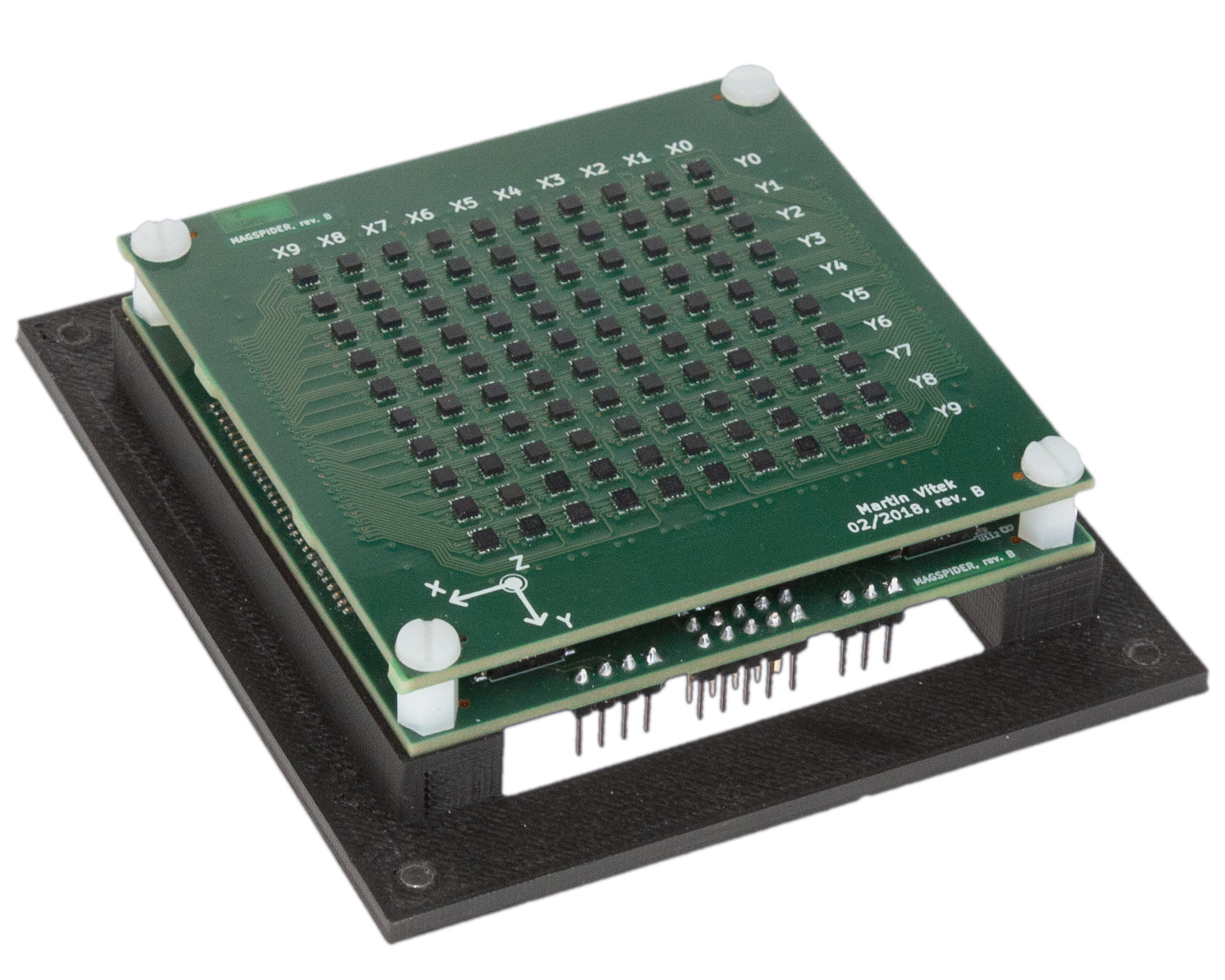
The measuring device is based on sensor LSM303AGR, which includes a triple-axis magnetometer, triple-axis accelerometer, and thermometer in package LGA-12 with dimensions of 2 × 2 mm. Dynamic range of the sensor is ±5 mT, resolution is 150 nT and output data rate is 100 Hz. The magnetometer is based on the AMR (Anisotropic Magnetoresistance) technology, with set and reset coils for eliminating the offset hysteresis. To speed up scanning of the magnetic field, 100 sensors were used in the matrix 10 by 10 with a spacing of 5 mm. The total area is, therefore, 45 mm × 45 mm and scanning speed is 100× higher than with single sensor.
The device is controlled by an ARM Cortex M0+ microcontroller ATSAMD21G17A with 128 kB FLASH and 16 kB RAM, running at 48 MHz. Communication with the computer is possible by USB with a virtual serial port, over embedded UART to USB converter FT231XS, at 3 MBd.
Positioning Device
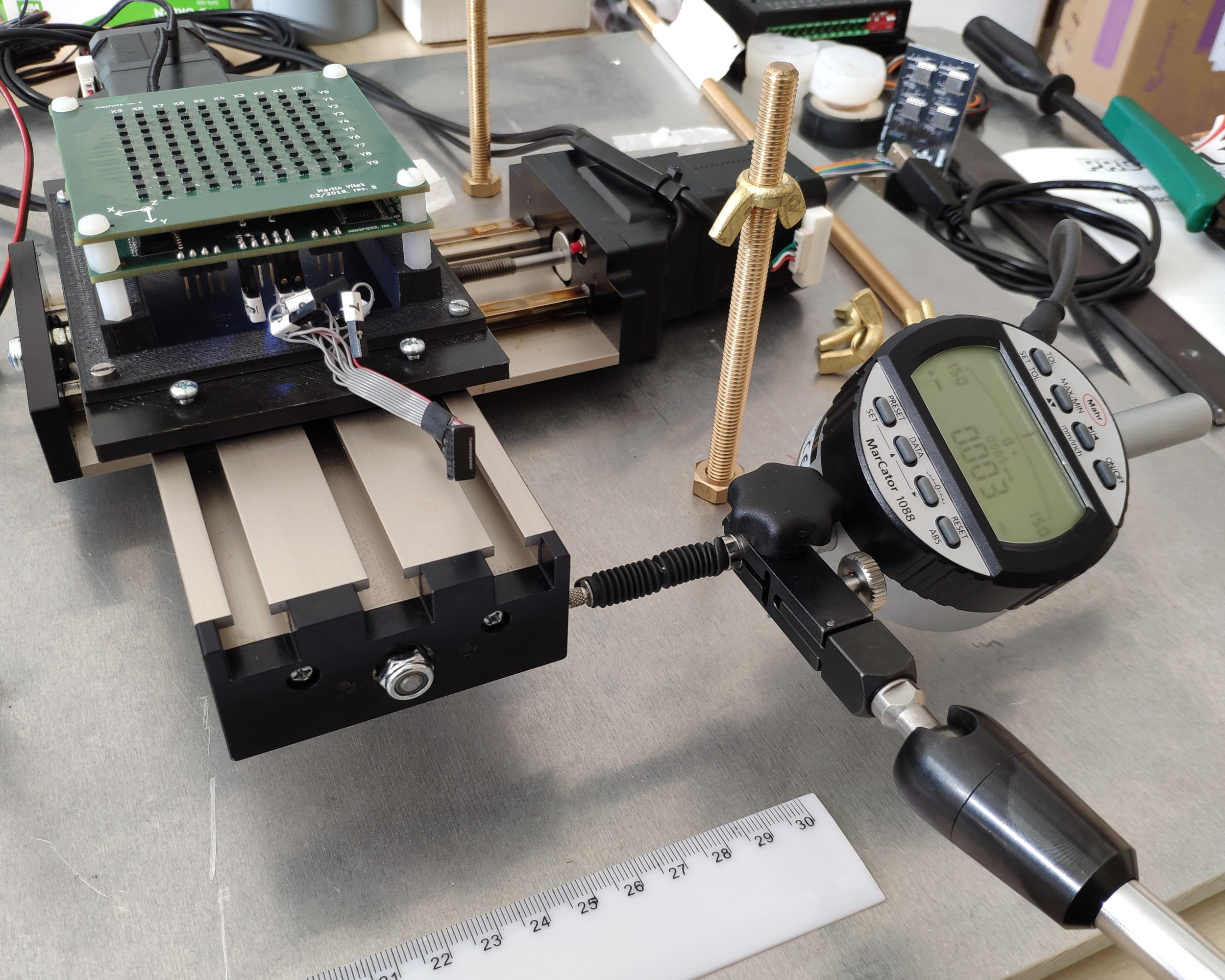
The micro-positioning device is built on x−y table KT-70/CNC-ready. It has working area of 150 x 70 mm and resolution of one step is 5 µm. The stepper motors of the table are controlled with two stepper drivers HY-DIV168N-3.5A and Arduino Uno.
Measuring device is mounted on this positioning device, therefore scan resolution can be increased from 10 x 10 Px up to 10 000 x 10 000 Px. At this time only area of 50 x 50 mm can be scanned at once.
Controll Software
MagDisplayThe developed MATLAB application gives user the option to visualize the measurement in real time. The application has multiple options how the measurement can be visualized. The AppDesigner was used to create this application.
MagServer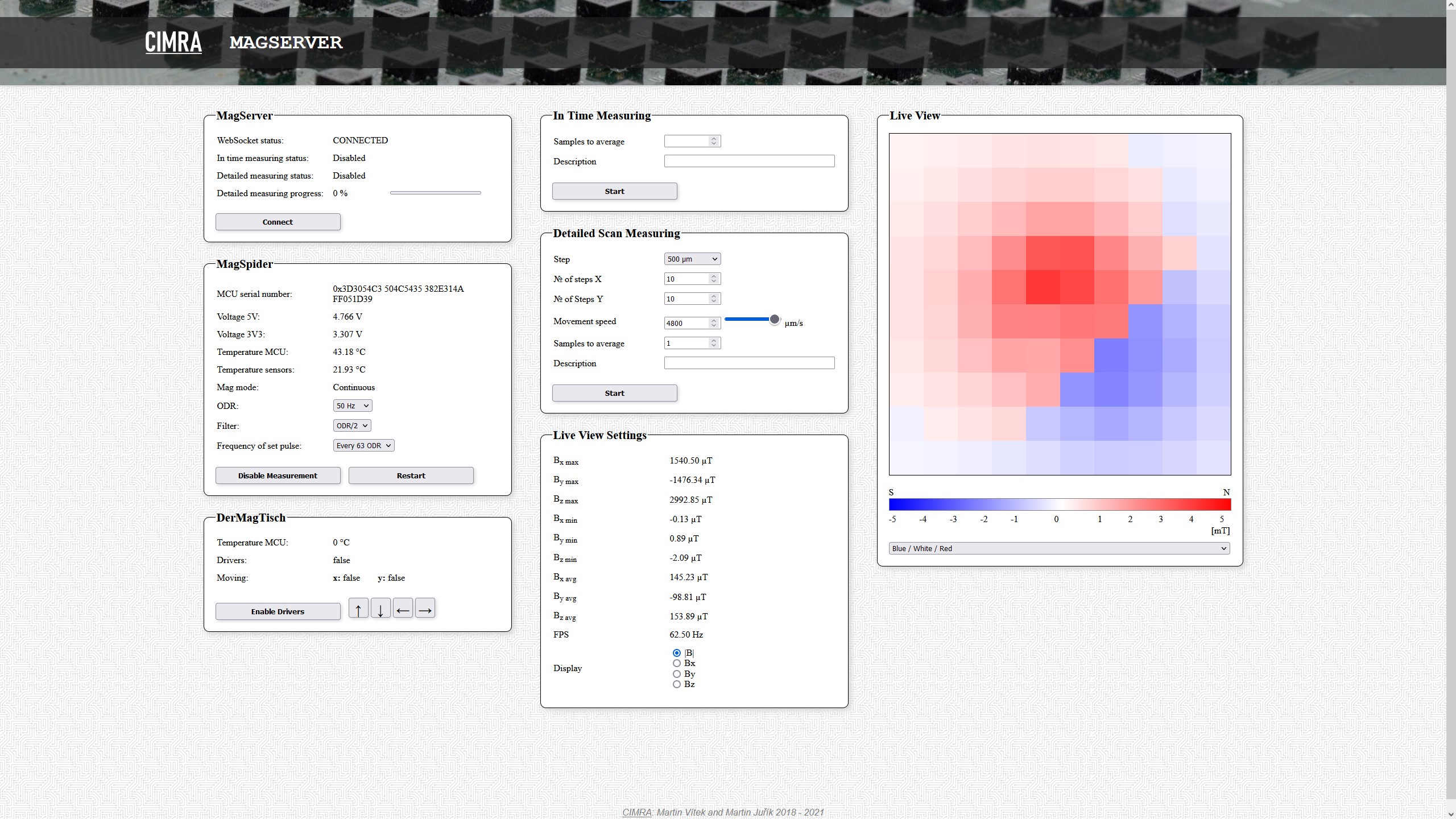
The PC software is programmed in C++17 using the server-client architecture. The server side communicates with the measuring and positioning device and controls the measurement process. The user interface is made as a web page communicating with the server via WebSockets. It is possible to run this software both on Linux and Windows.
Results
Future challenges
- Third axis
- Calibration of sensors
- Synchronization between sensors
- Position feedback
- Better drivers for stepper motors
- Better visualization of magnetic field
- Magnetic camera
- Commercialization
Publications
VÍTEK, Martin; JUŘÍK, Martin and MACH, František. Zařízení pro mapování stacionárního magnetického pole v rovině. Pilsen, 2019. Available at: http://hdl.handle.net/11025/37334. Master thesis. University of West Bohemia. Faculty of Electrical Engineering.
VÍTEK, Martin; JUŘÍK, Martin and MACH, František. Precise Scanner of Magnetic Field Distribution. In Proceedings of MARSS 2019: The 4th International Conference on Manipulation, Automation, and Robotics at Small Scales. Piscataway: IEEE, 2019. s. 1-3. ISBN: 978-1-72810-947-3