
Magnetic Minirobots
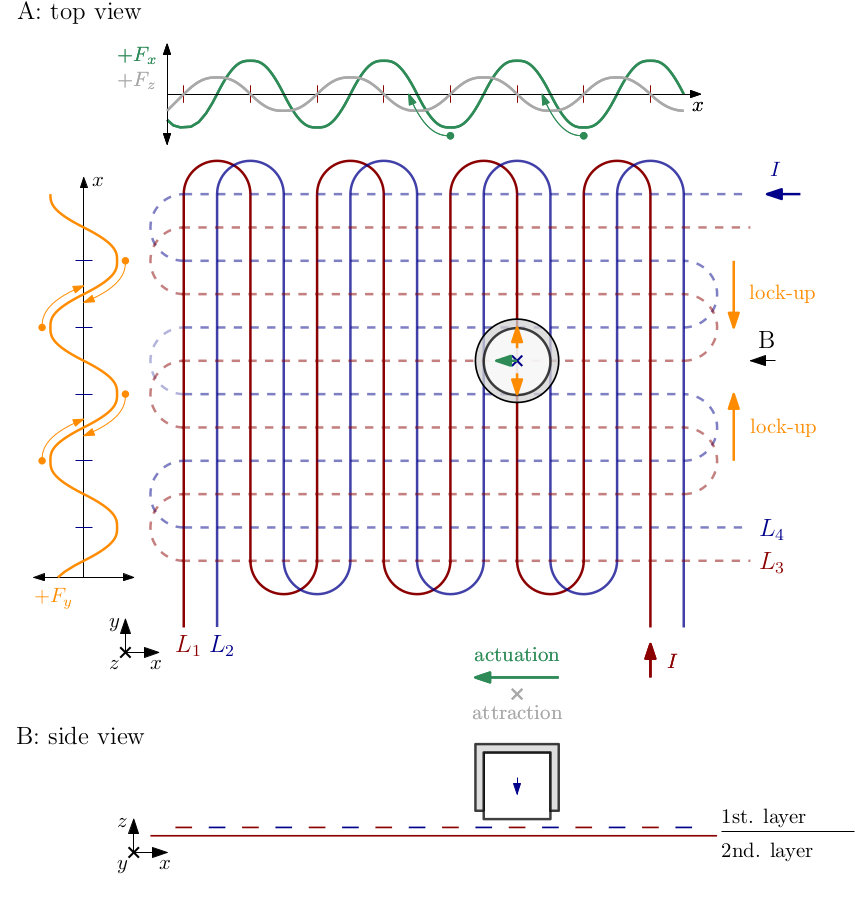
There is a lot of research going on the topic of miniature actuation on a scale from mm to nm. We are for now focusing on milli and micro scale. Our developed system can actuate miniature untethered robots on planar surfaces. The system uses a pair of coplanar coils in one direction. To get two degrees of freedom, two pairs of coils, which are perpendicular to itself, are used. Coils are made on multilayer PCB - for basic actuation, only two layers are needed.
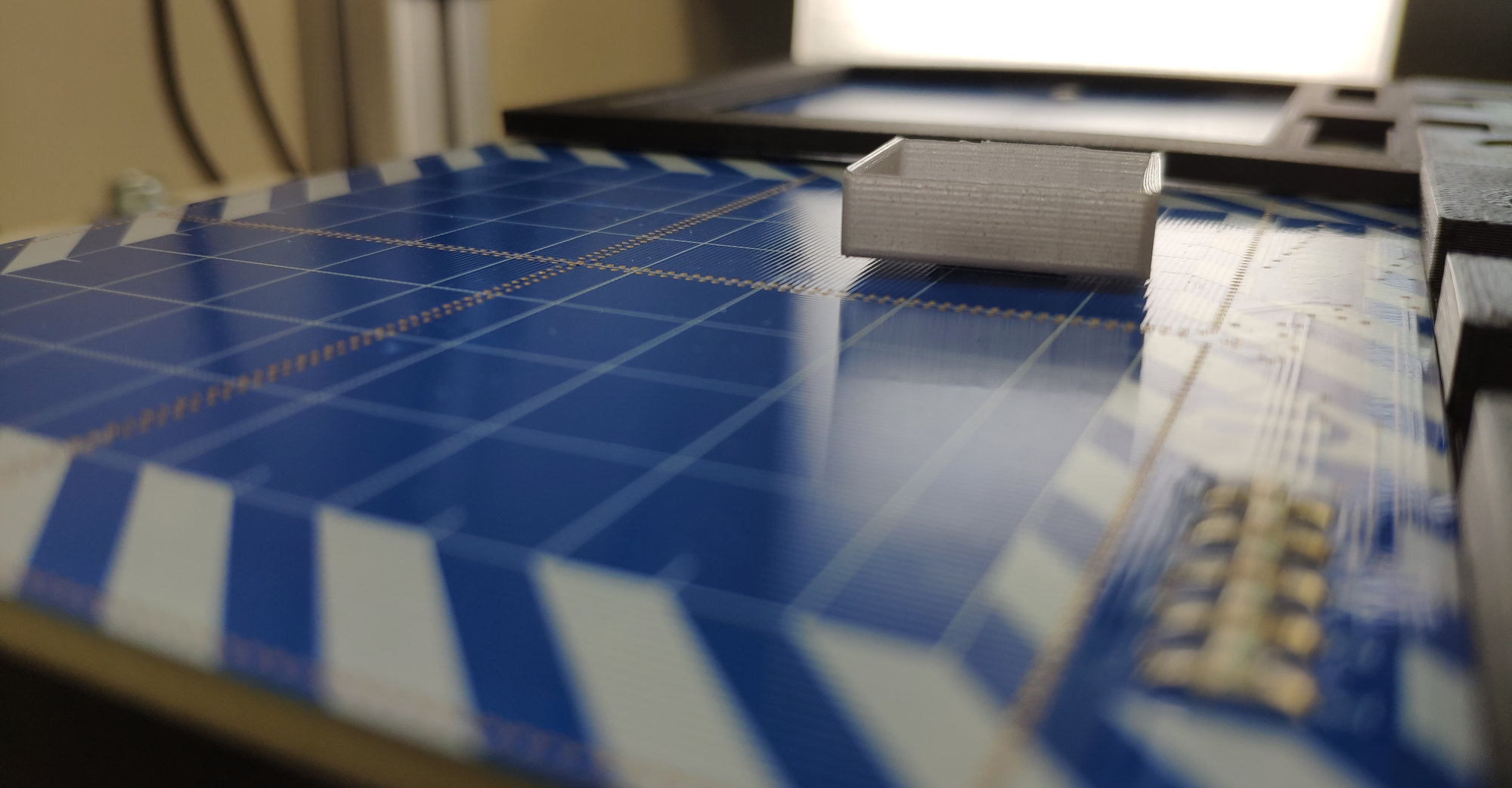
The main parts of the robots are permanent magnets. We are using magnets with a diameter of only 1 mm and a height of 1 mm or 0.5 mm. The smallest robots are made only from one permanent magnet and their body is printed on the 3D printer. But by using multiple magnets for one robot, the load capacity can be increased. For example, a robot with 20 permanent magnets can carry 6 g load, which is 4 000 % of its weigth. Also, we are experimenting with robots made from hydrogel with dimensions of 50 x 200 µm.
Platforms
Scarabeus
Basic platform with only two sets of actuation coils.
Isoptera
PCB is divided into four independent areas.
In each area, there are actuation coils.
Therefore, robots in one area can move independently on the other ones.
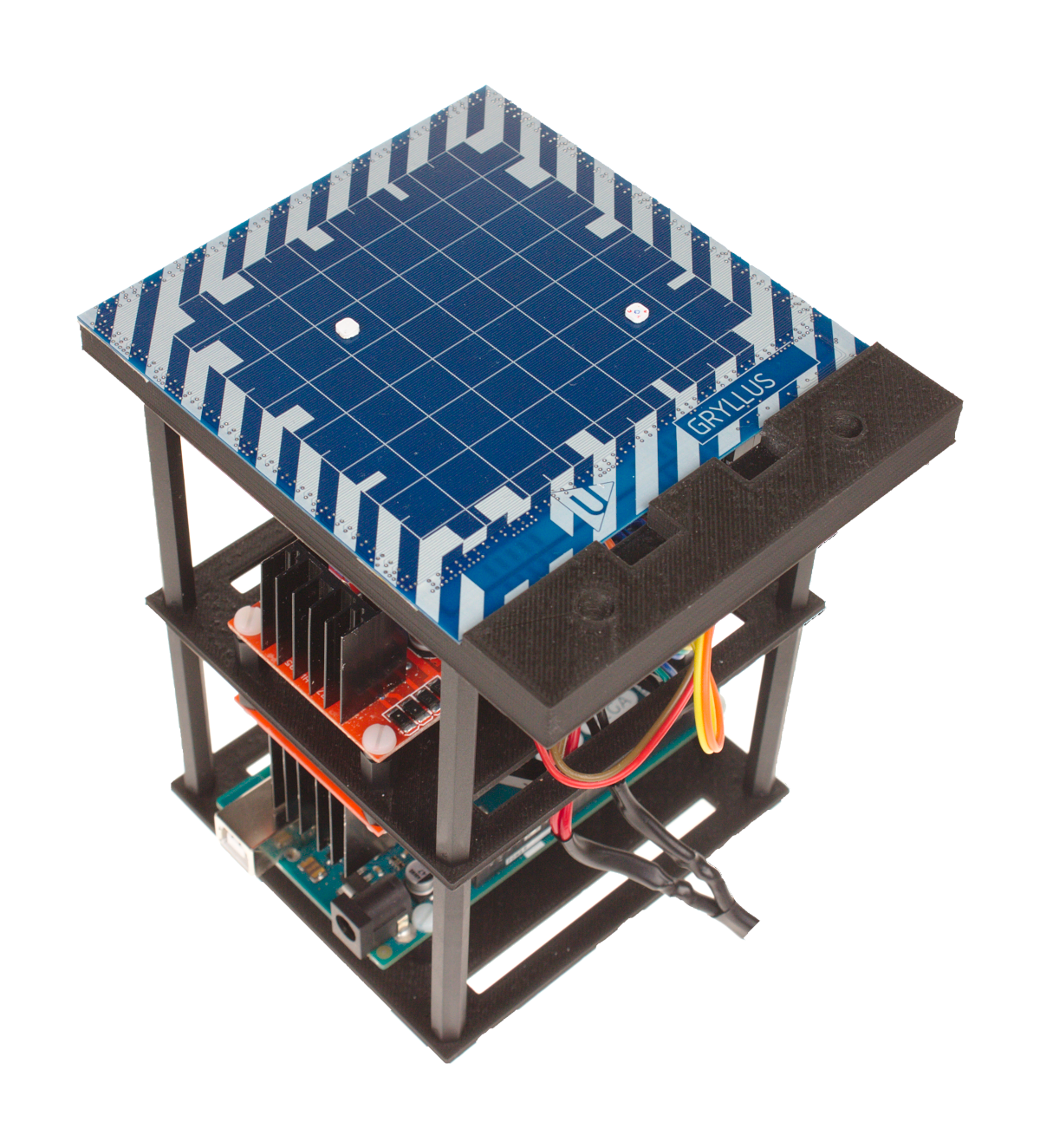
Gryllus
By adding two more layers to the PCB, it is possible to add freezing coils under actuation coils.
Those freezing coils can be used to counteract the actuation field and to create freezing areas without the actuation force.
By using those freezing areas it is possible to use multiple robots to do collective work.
Gryllus 2
This is the second version of the Gryllus platform.
On the five-layer PCB, there are actuation coils, multiple freezing areas, and testing coils for testing of robots splitting and turning.
Gryllus2
With adding more independent coils to the PCB, the complexity of the driving circuit rises and it is impractical on the bigger scale.
This platform uses only two layers for actuation and two for creating the freezing areas.
There are only two freezing coils for each direction and those coils have different a pitch than actuation ones and they cover the whole area.
By different switching sequences, it is possible to create multiple freezing areas, using the same freezing coils.
This greatly reduces the complexity of the electronics.
Digital materials
Imagine a system, in which you can get a different thing from the same materials.
For example, an expedition to Mars will have limited resources.
It would be beneficial for them, to create tools for building the base and after the base will be built, disassemble them and use the material for other tools used for living.
In our first experiments, we are focusing on designing robots and bits - small parts with electrical components.
And using our minirobotics platforms, we are trying to assemble a variety of the electrical circuits from those bits.
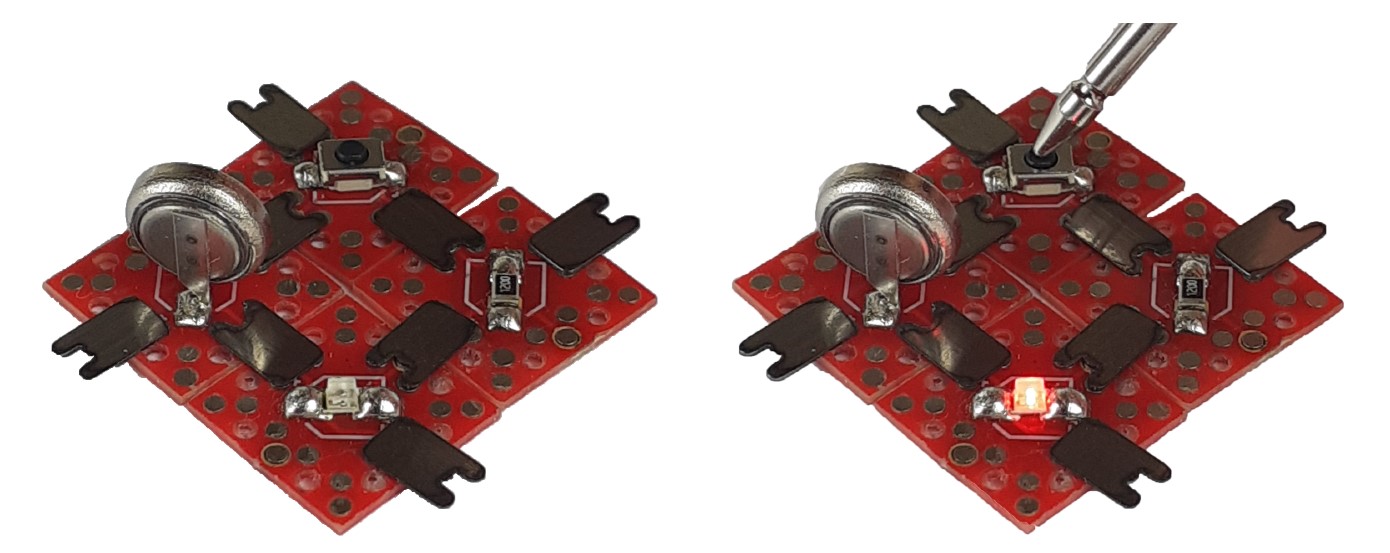
Smart Bots
Another improvement to our system would be intelligent minirobots, which could actuate, measure, or interact with other mininirobots. The first prototype of the smart minirobot has power and communication delivered over thin two thin wires and it is capable of several types of measurements. The next research will be focused on wireless communication, wireless power delivery, and miniaturization.
General project decription
Possible applications
Control software
Future challenges
- Selective and independent actuation
- Smaller robots
- Integration of the electronic to the actuation PCB
- Algorithms for collective control
- Interactions between robots
- Localization of robots
Publications
KUTHAN, Jiří; and MACH, František. Elektromagnetický systém pro polohování magnetických těles. Pilsen, 2017. Available at: http://hdl.handle.net/11025/27945. Master thesis. University of West Bohemia. Faculty of Electrical Engineering.
KUTHAN, J., JUŘÍK, M. Magneticky aktuovaný robotický systém pracující v jedné rovině. In Elektrotechnika a informatika 2017. Elektrotechnika, elektronika, elektroenergetika. Plzeň: Západočeská univerzita v Plzni, 2017. s. 35-38. ISBN: 978-80-261-0712-5
KUTHAN, J., MACH, F. Magnetically guided actuation of ferromagnetic bodies on the planar surfaces : numerical modeling and experimental verification. In Proceedings of 2017 18th International Conference Computational Problems of Electrical Engineering (CPEE). Piscataway: IEEE, 2017. s. 1-4. ISBN: 978-1-5386-1040-4
KUTHAN, J., JUŘÍK, M. Key aspects of magnetically guided actuation on planar surfaces. In Elektrotechnika a informatika 2018. Elektrotechnika, elektronika, elektroenergetika. Plzeň: Západočeská univerzita v Plzni, 2018. s. 73-76. ISBN: 978-80-261-0785-9
JUŘÍK, M., ŠMÍDL, V., KUTHAN, J., MACH, F. Trade-off between resolution and frame rate for visual tracking of mini-robots on planar surfaces. In Proceedings of MARSS 2019 : 4th International Conference on Manipulation, Automation, and Robotics at Small Scales. Piscataway: IEEE, 2019. s. 1-6. ISBN: 978-1-72810-947-3
JUŘÍK, M., KUTHAN, J., VLČEK, J., MACH, F. Positioning uncertainty reduction of magnetically guided actuation on planar surfaces. In 2019 International Conference on Robotics and Automation (ICRA 2019) : /proceedings/. Piscataway: IEEE, 2019. s. 1772-1778. ISBN: 978-1-5386-6026-3 , ISSN: 1050-4729
KUTHAN, J., JUŘÍK, M., MACH, F. Magnetic actuation of multiple robots by the coplanar coils system. In Proceedings of MARSS 2019 : The 4th International Conference on Manipulation, Automation, and Robotics at Small Scales. Piscataway: IEEE, 2019. s. 1-5. ISBN: 978-1-72810-947-3